
In practical projects, different devices often use their own independent communication interfaces, such as serial ports, Ethernet, wireless networks, or fiber optics. As a dedicated communication protocol, CAN bus is typically not directly compatible with these systems. This “interface inconsistency” is especially common in system integration, equipment upgrades, and cross-platform communication.
CAN converters are widely used to address this challenge. By converting data formats and interface types, they enable CAN networks to connect with various communication methods, thereby improving system interoperability and overall flexibility.
CAN to Serial Converter
A CAN bus to serial converter enables bidirectional data conversion between CAN bus and serial devices, providing a reliable way for traditional serial equipment to access CAN networks. These devices typically integrate CAN interfaces and serial interfaces (such as RS-232, RS-485, or RS-422), and support protocol standards like CAN 2.0A / CAN 2.0B. They allow transparent transmission between serial data and CAN frames. In this way, existing serial devices can be connected to CAN networks without modifying their original communication structure, enabling data exchange and system expansion.

RS232 to CAN Converter
RS-232 is a classic serial communication interface with a simple structure, mainly used for short-distance point-to-point communication, typically within 15 meters. An RS232 to CAN bus converter enables data conversion and interconnection between RS-232 devices and CAN bus. This solution is commonly used to connect computers or legacy serial devices to CAN networks for debugging, configuration, and system upgrades.
RS485 to CAN Converter
RS-485 uses differential signal transmission, offering strong anti-interference capability and long transmission distance, up to 1200 meters. It also supports multi-node communication, making it suitable for complex industrial environments. An RS485 to CAN bus converter enables seamless connection between RS-485 networks and CAN bus, facilitating multi-device access and unified communication management, while improving system scalability and stability.
RS422 to CAN Converter
RS-422 also adopts a differential transmission mechanism and supports full-duplex communication, allowing simultaneous data transmission and reception. An RS422 to CAN bus converter provides stable connectivity between RS-422 devices and CAN systems, meeting application requirements with high demands for real-time performance and reliability.
CAN to Wi-Fi Converter
In wireless communication scenarios, a CAN bus to Wi-Fi converter can convert CAN protocol data into Wi-Fi signals, enabling CAN devices to connect to wireless networks. These devices support local area network communication and remote data transmission, helping users eliminate the limitations of traditional cabling. They are particularly useful in applications such as mobile device diagnostics, vehicle road testing data collection, and temporary network deployment, offering greater communication flexibility.
CAN to USB Converter
A CAN bus to USB converter connects to a PC or industrial host via USB, enabling CAN bus data transmission, acquisition, and real-time monitoring. It supports bidirectional communication and plug-and-play functionality, allowing quick access to CAN networks without complex configuration. It is widely used in laboratory testing, industrial control, and automotive network applications as a control node for data processing and acquisition.
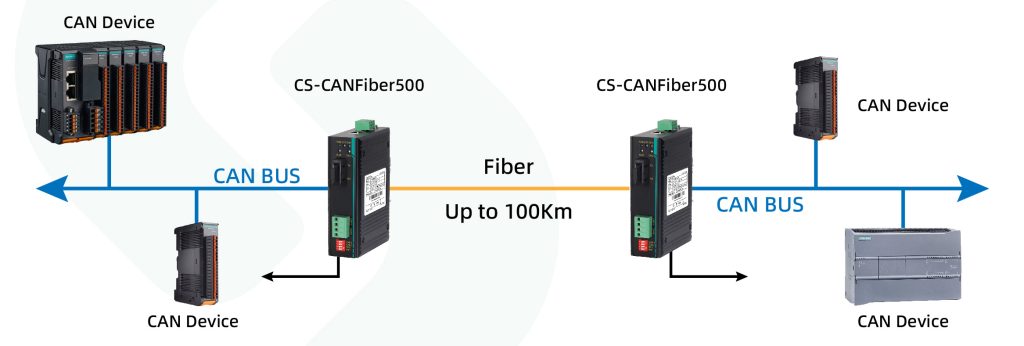
CAN to Fiber Converter
When CAN bus needs to operate over long distances or in environments with strong electromagnetic interference, a CAN to fiber optic converter is an ideal solution. These devices are typically used in pairs, with one end connected to the CAN network and the other to a fiber optic link. The converter transforms CAN electrical signals into optical signals for transmission through fiber, and then converts them back to CAN signals at the receiving end. This optical transmission method not only supports long-distance communication—ranging from tens to even hundreds of kilometers—but also provides effective isolation from electromagnetic interference and lightning risks due to the non-conductive nature of fiber.
Based on fiber type, CAN bus to fiber optic converters can be divided into single-mode and multi-mode types:
CAN to Single Mode Fiber Converter
For long-distance transmission applications, single-mode fiber is typically used. It features a smaller core and lower signal attenuation, supporting longer communication distances, usually up to 20 km, 40 km, or even 100 km. CAN bus to single mode fiber converters are more suitable for cross-region communication and long-distance networking, offering higher reliability in systems with strict requirements for transmission distance and stability.
CAN to Multi Mode Fiber Converter
For shorter-distance communication, multi-mode fiber is a more cost-effective option. It has a larger core, making light coupling easier, but the transmission distance is typically within 2 km. CAN to multi mode fiber optic converters are commonly used in building networks or localized industrial connections, ensuring stable communication while reducing overall cabling costs.
CANbus to Ethernet Gateway
A CAN to Ethernet gateway (also known as a CAN to TCP/IP gateway) is an ideal solution for integrating CAN networks into large and complex systems. It features a built-in TCP/IP protocol stack, allowing CAN data to be encapsulated into Ethernet packets for bidirectional transparent transmission between CAN and Ethernet. Leveraging Ethernet network architecture, it enables long-distance communication and easy integration with various IP-based platforms. In industrial automation, robotics, and other applications requiring reliable long-distance data transmission, this converter serves as a stable and efficient communication bridge between CAN bus and Ethernet networks.

Conclusion
As industrial systems become increasingly complex and communication demands continue to grow, a single communication method is no longer sufficient for multi-scenario applications. By selecting appropriate types of CAN bus converters, it is possible to break the limitations between different communication interfaces and achieve flexible system expansion and efficient integration.
In practical applications, factors such as transmission distance, network topology, anti-interference requirements, and interface types should be comprehensively evaluated to choose the most suitable conversion solution, ensuring system stability and long-term reliability.


